


Cleaning? Let AI handle it
With the new X50 Series, Dreame brings artificial intelligence into home cleaning: advanced technology and sleek design come together to simplify home care, effortlessly.



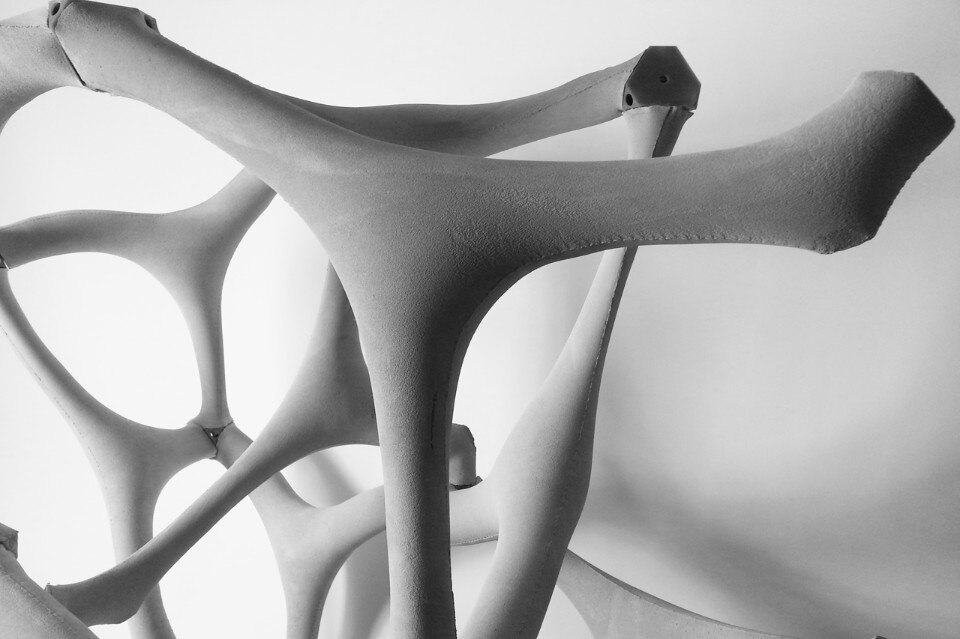

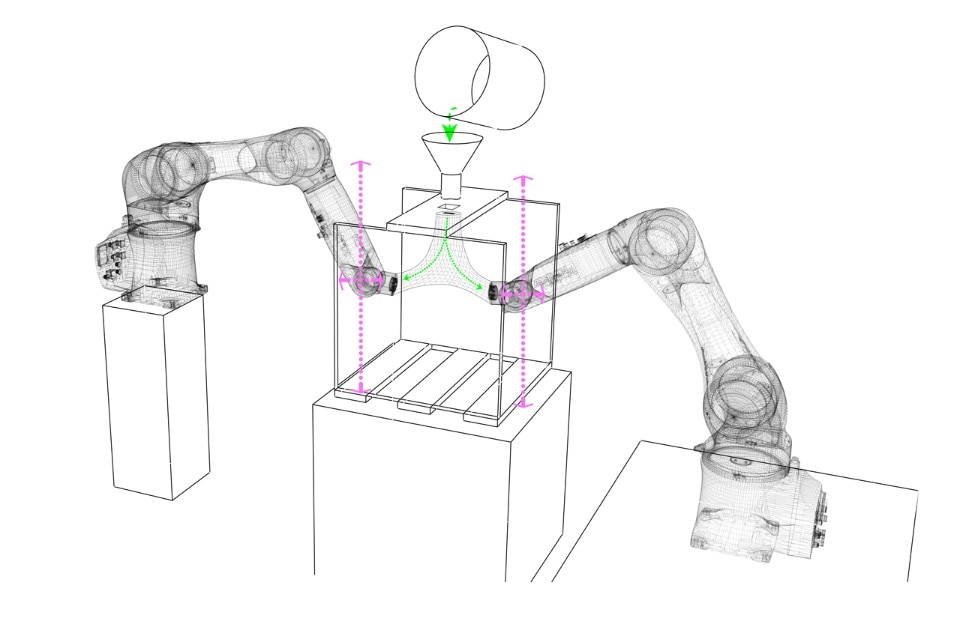
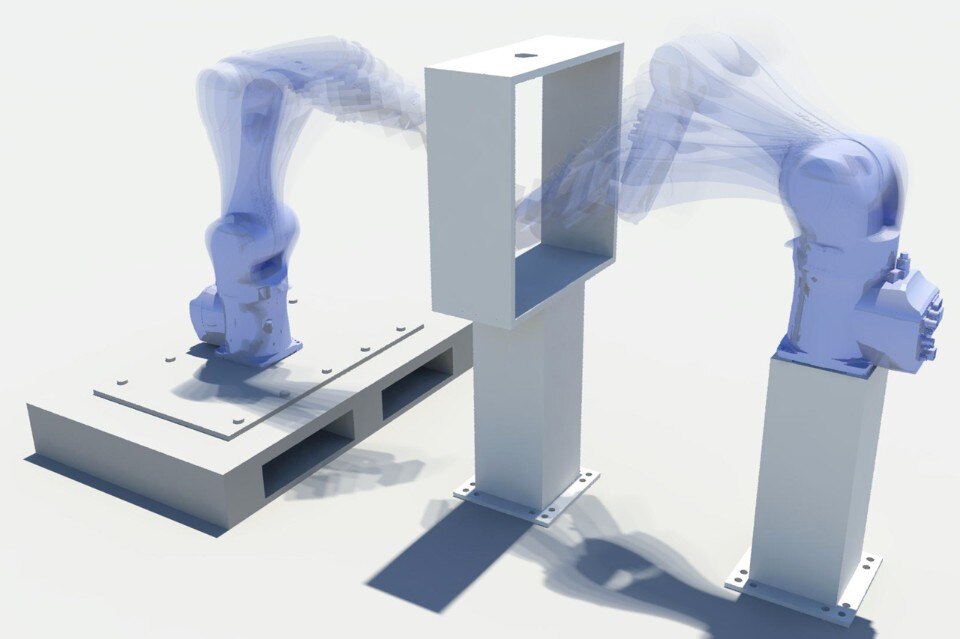
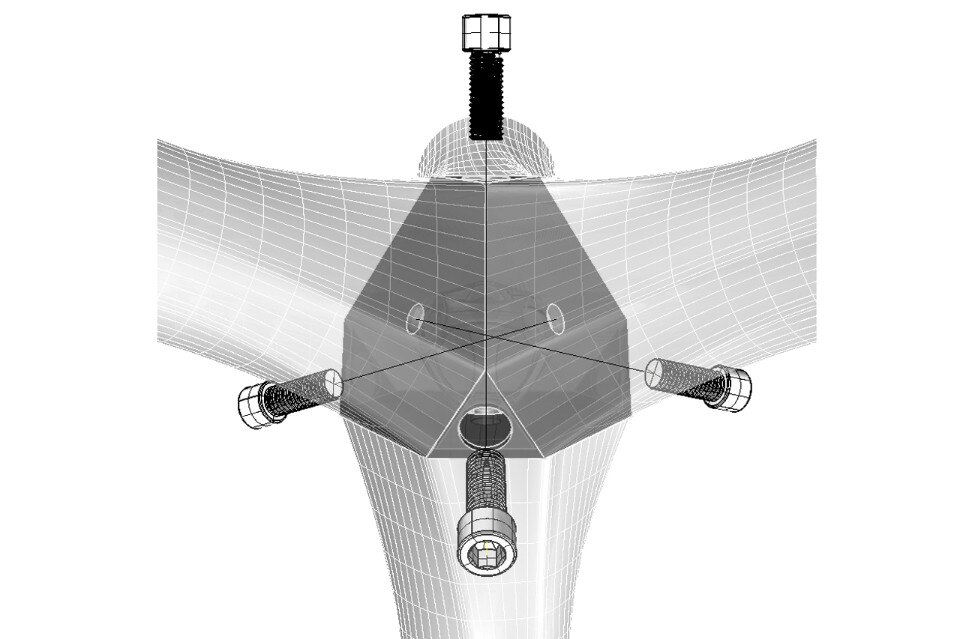
Fabric Forms
Design: Ron Culver and Joseph Sarafian
Year: 2016

Marble matters– exploring Carrara’s legacy
Sixteen young international architects took part in two intensive training days in Carrara, organized by FUM Academy and YACademy, featuring visits to the marble quarries and a design workshop focused on the use of the material.











